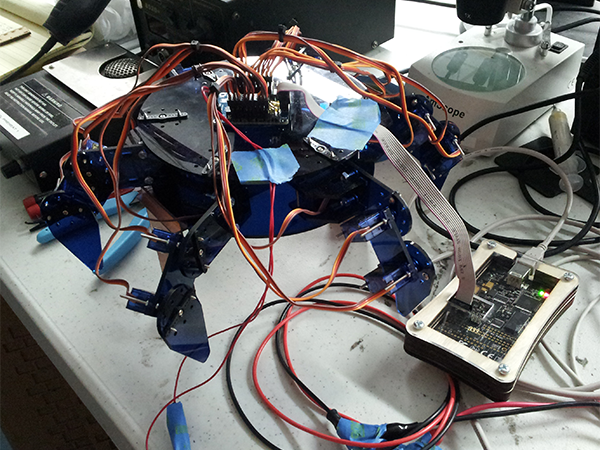
Hexapod robot capable of inverse kinematics for calculating walking sequences. A program was written that physically models the hexapod and records keyframes. This allows the user to create their own movement sequecnes which they can upload to the hexapod to play back.
Launch website »