COBALT - Payload Avionics Lead, JPL As Lead Payload Avionics Engineer for the CoOperative Blending of Autonomous Landing Technology (COBALT) project, I was responsible for the payload avionics design, fabrication, assembly, testing, and flight operations. The goal of this project was to develop new precision-landing Guidance, Navigation and Control (GN&C) technology by fusing a third-generation Navigation Doppler Lidar (NDL) sensor for velocity and range measurements, and the Lander Vision System (LVS), which provides passive-optical Terrain Relative Navigation (TRN) state estimates. The payload was flown on the Masten Xodiac vertical take-off, vertical landing (VTVL) rocket vehicle.
More Details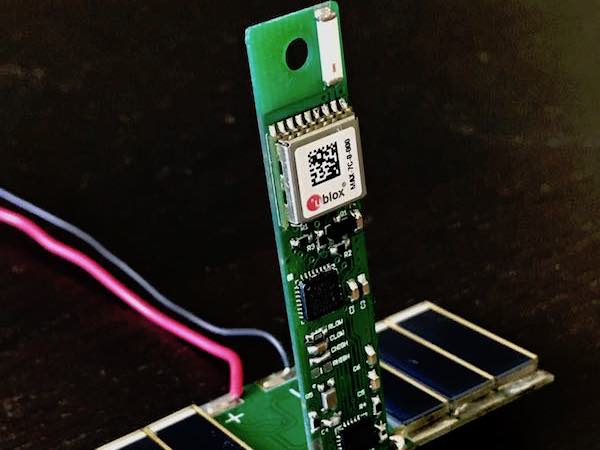
HABEXpico is a lightweight high altitude balloon payload designed for long duration flights. Using superpressure balloons, HABEXpico can fly to specific altitudes and maintain a stable float. The payload is equipped with a GPS, microcontroller, and radio module for transmitting location and power status. To maximize energy efficiency, an on-board power management circuit charges the payload batteries using solar panels, while the microcontroller balances the use of payload subsystems.
More Details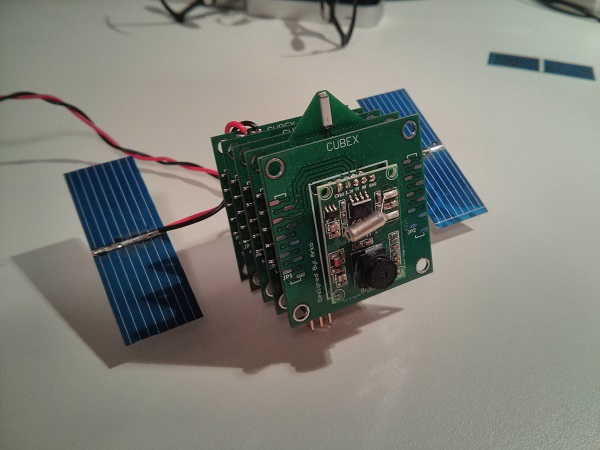
I designed, built, tested, and flew a high altitude balloon payload called CUBEX. CUBEX is a high altitude balloon payload with a camera, GPS, ISM band radio, lipo battery, solar cells, and charger/power management circuit. The payload is capable of sending downlink telemetry of its GPS coordinates as well as pictures it takes while in flight, all live. The solar charging circuit allows the payload to run for days as long as the balloon holds float. The payload made its maiden voyage at the Layerone conference in Monrovia, CA on May 24th.
More Details
I designed, built, and manufactured a USB programmable board which allows you to write graphics & music demos and play them over a VGA monitor and audio jack. There are limited system resources and the goal is to write code and fit spectacular graphics effects with songs. You can write code in either ASM or C. One of the categories for the demo party is the Layerone Demoscene Board. The goal is to fit cool graphics and audio demos and to wow the audience at the Layerone Demo Party!
More Details
I was fortunate enough to play a key roll in the restoration of the original screen used DeLorean "A" Car from Back to the Future. My role in the team included redesigning the time circuits to be movie accurate, as well as integrating the custom designed electronics controller with the flux capacitor, SID, speed-o-meter, gauges, and sound system.
'After nearly 23 years since the final installment of the Back to the Future trilogy was on the silver screen, the museum-quality restoration of the original "A" car DeLorean is now complete. Visitors to Universal Studios Hollywood can view the DeLorean in all of its time machine glory, now on display at the NBCUniversal Experience.'
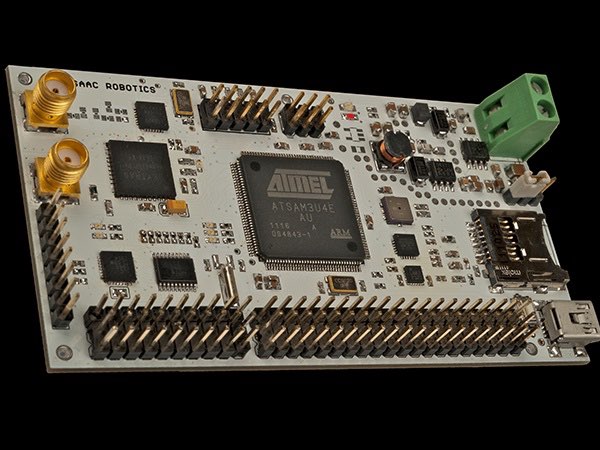
I designed and built the Isaac Robotics robotics development board. The Isaac board boasts a powerful 32-bit 96 MHz ARM Cortex-M3 chip. Isaac's primary goal was to make programming and building robots very easy. Just download the free Atmel Studio 6 development environment and the Isaac installer. The installer includes all the open source development libraries to start programming your robot!
Isaac comes with extensive pre-built sensor drivers, a Kalman filter, control code, and a beta library of learning algorithms. It's programmable via USB, Zigbee Wireless Communication, JTAG, and has a Micro SD Card slot for storing data (SDHC Compatible). Its versatile on-board power supply allows the board to be powered by anything between 6 and 24 volts.
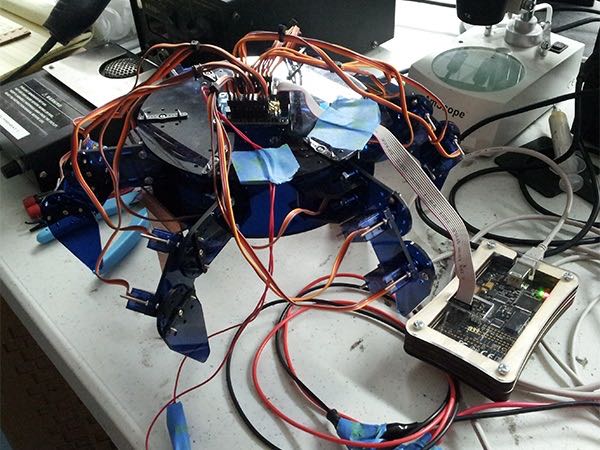
Hexapod robot capable of inverse kinematics for calculating walking sequences. A program was written that physically models the hexapod and records keyframes. This allows the user to create their own movement sequences which they can upload to the hexapod to play back.
More Details
The quadrotor uav project is a lightweight low-cost uav capable of navigation by waypoints defined by a computer and remote control. The uav consist of four brushless motors with propellers, a custom designed pcb board with an ARM Cortex-M3 based processor, 3 axis gyro, 3 axis accelerometer, compass, gps, wireless communication, and sonar.
More Details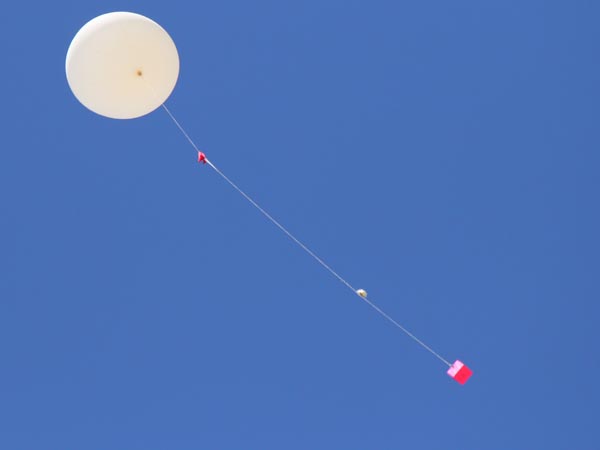
The HABEX project is an independently funded high altitude balloon capable of reaching a max altitude of 31,000m. The hardware consists of a weather balloon, parachute, and a payload. The payload includes redundant radios tuned to the APRS frequencies which report GPS coordinates. The payload is capable of recording pictures, and taking scientific data such as acceleration, velocity, barometeric pressure, temperature, and more. We successfully launched and recovered our second payload on March 30th, 2013.
More Details
This badge was designed for use at DEFCON 18. The badge measures your Blood Alcohol Content (BAC). The board consists of an Atmel ATMEGA328, MQ-3 Alcohol sensor, 7-segment display (4), and a 9V battery. The code and hardware is open source.
More Details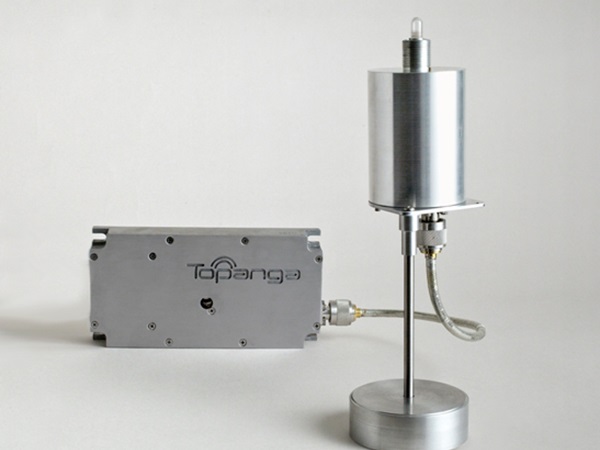
Developed firmware and software for high intensity plasma light bulb ballasts. Helped designed the control algorithm for igniting and maintaining the plasma arc, as well as developing a software interface for maintenance. Built, tested, and debugged ballast boards along with programming and preparing them for production.
More Details
The Segwii is a self balancing robot that is remotely controlled by a wiimote. I started this project to educate myself on embedded systems programming, and control loops. The goal of this project now is to educate robot enthusiasts, share ideas, and to improve on designs. There are many things to learn and help out in, including open source software and hardware, complementary filtering, PID (Proportional Integral Derivatives), and embedded systems programming. As a contributor to the site, you will be able to replicate this project, expand upon our existing design, and network with others about this and future projects.
More Details
Developing software used by the reliability and testing groups at JPL to track and report test results on flight hardware. Many of the forms and systems we develop are highly technical, and are custom made for each mission. The software is capable of recording parts, specifications, and test results, then creating reports and summaries of the tested parts. I was fortunate enough to have been given the opportunity to work with some of the most brilliant engineers and managers when I started work at JPL. The systems we worked on were used in the development of the Mars Science Laboratory Curiosity MSL, GRAIL, JUNO, and SMAP.
More Details
I researched and compiled information on past, current, and future earth science missions, to develop a fully searchable database of missions and instruments. Additionally, I integrated the database in a wiki environment to allow the users to access the database through their web browser. The primary database is based on Excel which allows the user to select certain options, settings, and filters, as well as character search the database. I also helped develop a cost estimation program for pre-phaseA mars missions. The ROMMIT cost estimation program observes past and present data of missions relative to their cost to best estimate a mars mission concepts final cost.
More Details
I worked on a humidity sensor capable of measuring moisture in harsh environments. Much of my time was spent on hardware design and software integration. The humidity sensor project demanded critical data analysis of different sensor prototypes, as well as a strong set of scientific troubleshooting skills. I developed a custom data logging circuit board, and wrote drivers to interface it with a LabVIEW VI designed to collect data. I proceeded to design, prototype, test and revise the humidity sensors. The final product was a moisture sensor which could survive the harshest environments, where most other sensors would fail.
More Details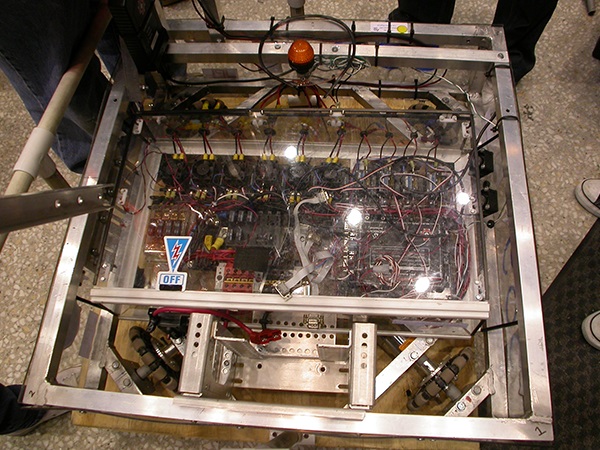
In 2007, I was given the opportunity at my high school to take an independent study course on robotics. The course only consisted of two students, David Khudaverdyan and myself. The class was self driven, and advised by Dr. Greg Neat, the robotics/computer science teacher. Throughout the course David and I researched, prototyped and developed an omni-directional drive system for robotics applications. The robot was mapped to a 3 axis joystick and able to move in any direction, including twist. As a result of our efforts, we received the Rockwell Automation in Control Award at the FIRST Robotics LA Regional in 2007.
More Details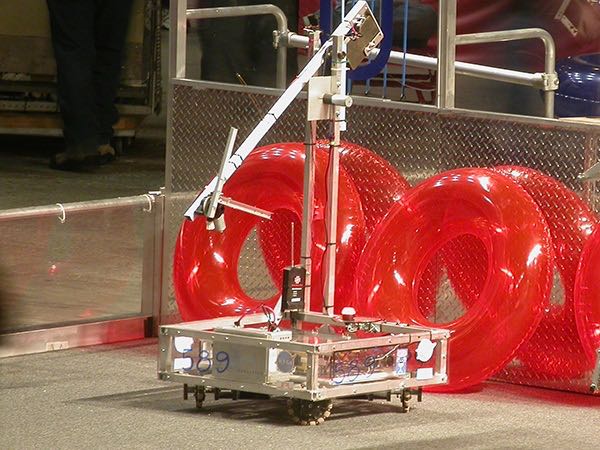
Throughout the four years I spent at Crescenta Valley High School, I participated in the FIRST Robotics Team (589). Many of my skills were obtained from this program including: Systems engineering, flowchart, timelines, working with deadline, designing, leadership, prototyping, CAD, robotic drive systems, fabrication, pneumatics, and data analysis. Each year my position in the team grew until I became one of three team capitans. During my last year I was responsible for the drive system design (an implementation of Omni) and system engineering. At the end of the season, I was award the "Arshak Award" which is the equivalent of an MVP award. Since my graduation I have returned to mentor for the team.
More Details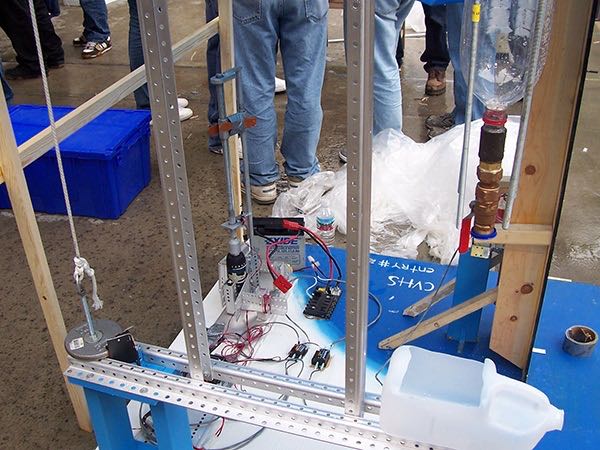
Since 2002, I have participated in the Annual JPL Invention Challenge. Each year, students in middle schools and high schools are given a certain challenge with a set deadline. I originally started my own team and was given a sponsorship by my high school. Evenually the program grew, as more students wanted to get involved, and in 2006 the challenge was integrated into the engineering class offered at the high school. Throughout the years we won many awards, and learned how to solve problems with creative and simple solutions. Since my graduation I have returned to mentor for the team.
More Details